


























🏎️ Động cơ Giảm tốc Có Encoder JGB37-520 Hiwonder
Dòng động cơ JGB37-520 là động cơ DC có chổi than, được tích hợp hộp số giảm tốc và một bộ encoder (bộ mã hóa), cho phép điều khiển tốc độ và vị trí vòng kín với độ chính xác cao.
1. ⚙️ Cấu tạo và Tính năng
-
Kiểu dáng: Thân động cơ bằng kim loại hình trụ, gắn liền với hộp giảm tốc màu bạc, và phần đầu là bộ encoder màu đen. * Encoder (Bộ mã hóa): Động cơ đi kèm với một encoder quang học hai pha (AB double phase encoder), cung cấp phản hồi về tốc độ và vị trí của trục động cơ.
-
Bánh răng Giảm tốc (Gearbox): Hộp số giảm tốc được tích hợp để tăng mô-men xoắn và giảm tốc độ đầu ra.
-
Điện áp định mức: Hầu hết các mẫu đều hoạt động ở điện áp định mức 12V (phạm vi khuyến nghị từ 11V đến 16V).
-
Trục ra: Trục ra loại chữ D (D-type eccentric shaft) có đường kính $\phi 6\text{mm}$.
-
Giao diện: Sử dụng đầu nối PH2.0-6PIN để kết nối với bộ điều khiển.
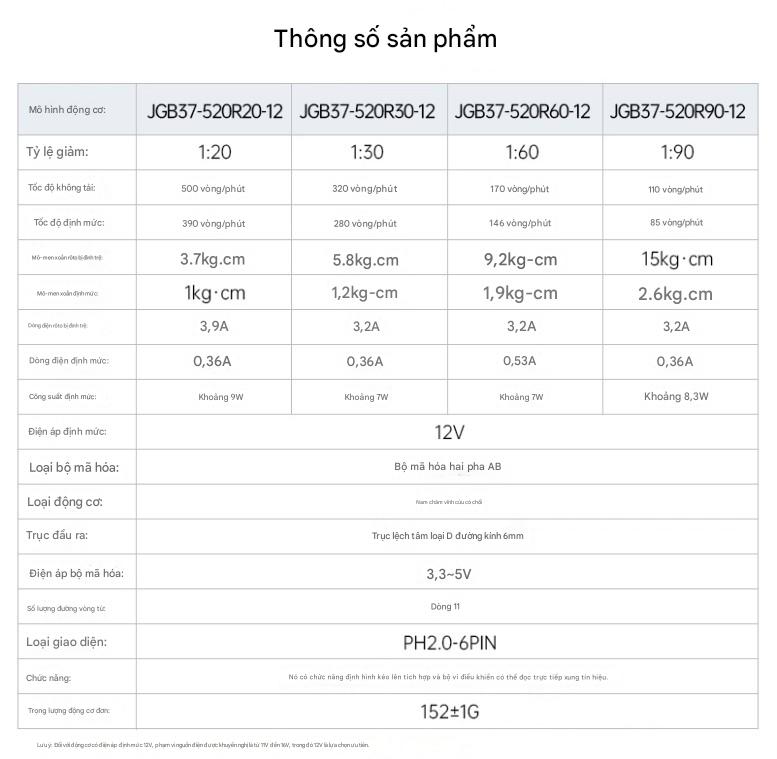
2. 📊 Phân loại và Thông số Kỹ thuật (Tóm tắt)
Dòng JGB37-520 có sẵn với nhiều tỷ số truyền (Reduction Ratios) khác nhau để đáp ứng các yêu cầu về tốc độ và mô-men xoắn khác nhau:
| Mã động cơ | Tỷ số giảm tốc (Reduction Ratio) | Tốc độ định mức (Rated Speed) | Mô-men xoắn định mức (Rated Torque) | Mô-men xoắn dừng (Stall Torque) |
| :--- | :--- | :--- | :--- | :--- |
| JGB37-520R20 | 1:20 | 390 rpm | $1.0\text{kg}\cdot\text{cm}$ | $3.7\text{kg}\cdot\text{cm}$ |
| JGB37-520R30 | 1:30 | 280 rpm | $1.2\text{kg}\cdot\text{cm}$ | $5.8\text{kg}\cdot\text{cm}$ |
| JGB37-520R60 | 1:60 | 146 rpm | $1.9\text{kg}\cdot\text{cm}$ | $9.2\text{kg}\cdot\text{cm}$ |
| JGB37-520R90 | 1:90 | 85 rpm | $2.6\text{kg}\cdot\text{cm}$ | $15\text{kg}\cdot\text{cm}$ |
Lưu ý: Các mẫu 1:60 và 1:90 có mô-men xoắn cao hơn, trong khi mẫu 1:20 có tốc độ quay cao hơn.
3. 🚗 Ứng dụng Robot Di động
Các động cơ này là lựa chọn tiêu chuẩn cho việc xây dựng khung gầm robot thông minh và các dự án sử dụng ROS:
-
Khung gầm Xe Robot: Thích hợp cho các loại xe 2 bánh, 4 bánh hoặc xe cơ khí phức tạp hơn (ví dụ: xe Mecanum). * Điều khiển Vòng kín (Closed-Loop Control): Encoder cho phép robot đo chính xác quãng đường và tốc độ di chuyển, cần thiết cho định vị (odometry) và điều khiển chính xác.
-
Bộ điều khiển RRCLite: Động cơ này thường được ghép nối với các bộ điều khiển chuyên dụng như RRCLite Controller để điều khiển các động cơ DC và servo cùng lúc.
4. ⚙️ Phụ kiện Lắp đặt
Động cơ thường được sử dụng cùng với:
-
Bánh xe: Cả bánh xe thông thường (68mm) và bánh xe Mecanum (65mm) đều có sẵn để lắp ráp.
-
Bộ nối trục (Couplings): Các bộ nối kim loại hình lục giác (Hex Couplings) được sử dụng để gắn chắc chắn bánh xe vào trục động cơ.
-
Giá đỡ: Giá đỡ chữ L (L-bracket) dày $37$ được sử dụng để cố định động cơ vào khung xe robot.