


































🛴 MiniBalan: Xe Robot Tự Cân Bằng Hai Bánh
MiniBalan là một nền tảng robot hai bánh cỡ lớn được thiết kế để học tập, nghiên cứu và phát triển các ứng dụng điều khiển nâng cao, đặc biệt là các thuật toán tự cân bằng và thị giác máy tính (AI Vision).
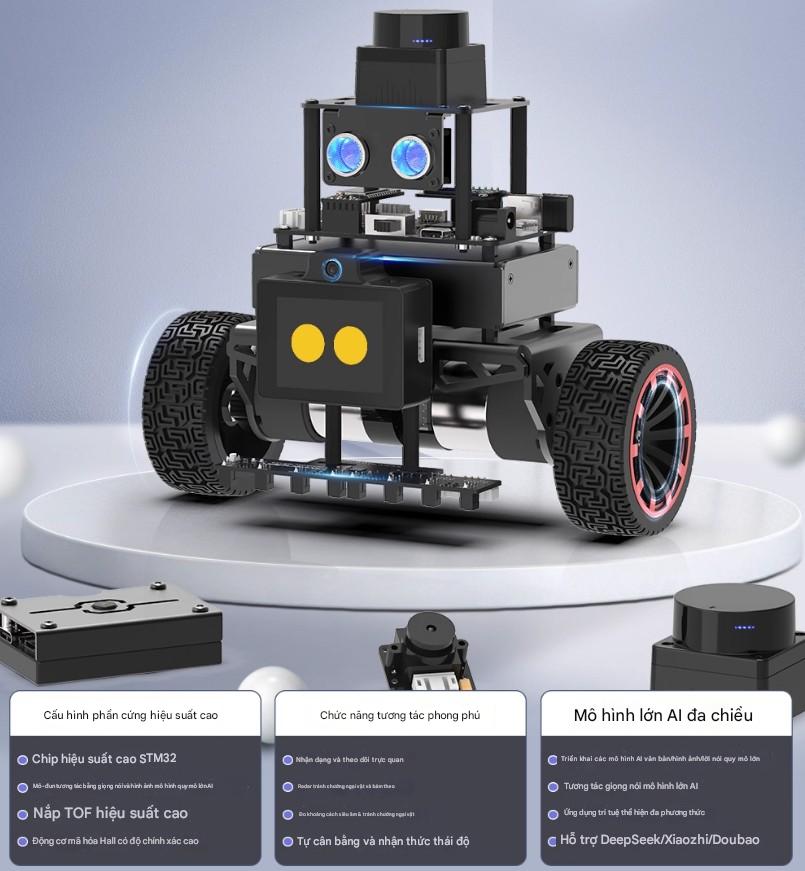
1. ⚙️ Cấu hình và Tính năng Cân bằng
-
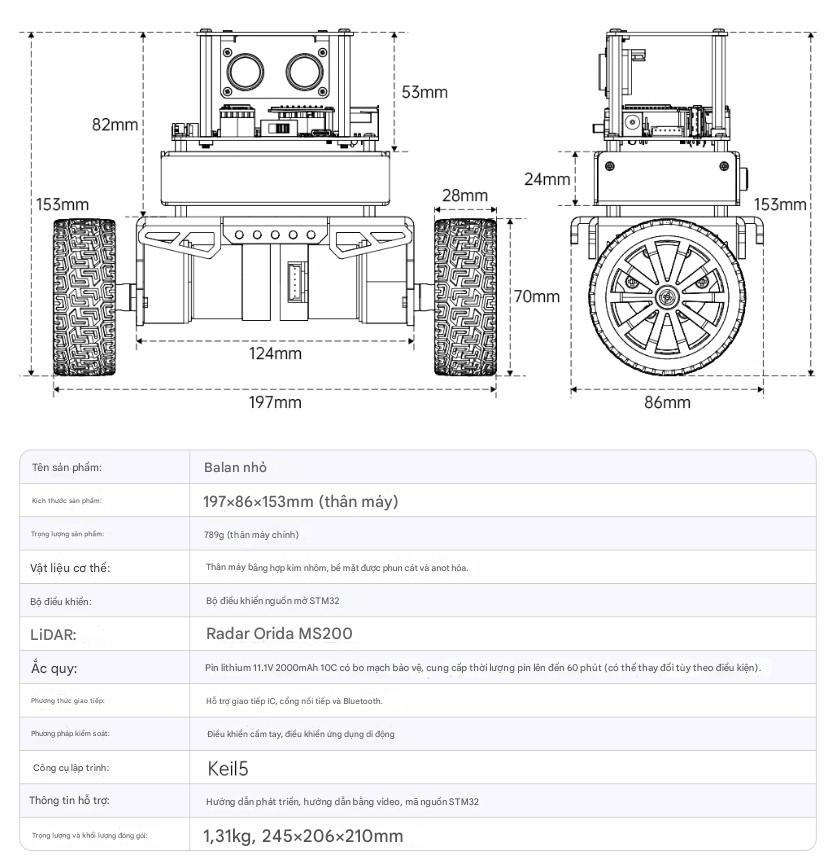
Thiết kế Cơ khí: Xe sử dụng khung gầm chắc chắn, hai bánh xe cỡ lớn và có không gian lắp đặt mở rộng cho nhiều mô-đun cảm biến và bộ điều khiển khác nhau.
-
Bộ điều khiển: MiniBalan thường được trang bị Vi điều khiển STM32 (trong các cấu hình nâng cao) hoặc các bộ điều khiển phổ biến khác như Raspberry Pi, Jetson Nano, Arduino, hoặc ESP32.
-
Tính năng Tự Cân bằng: Xe sử dụng các thuật toán điều khiển PID để duy trì trạng thái cân bằng thẳng đứng một cách tự động.
-
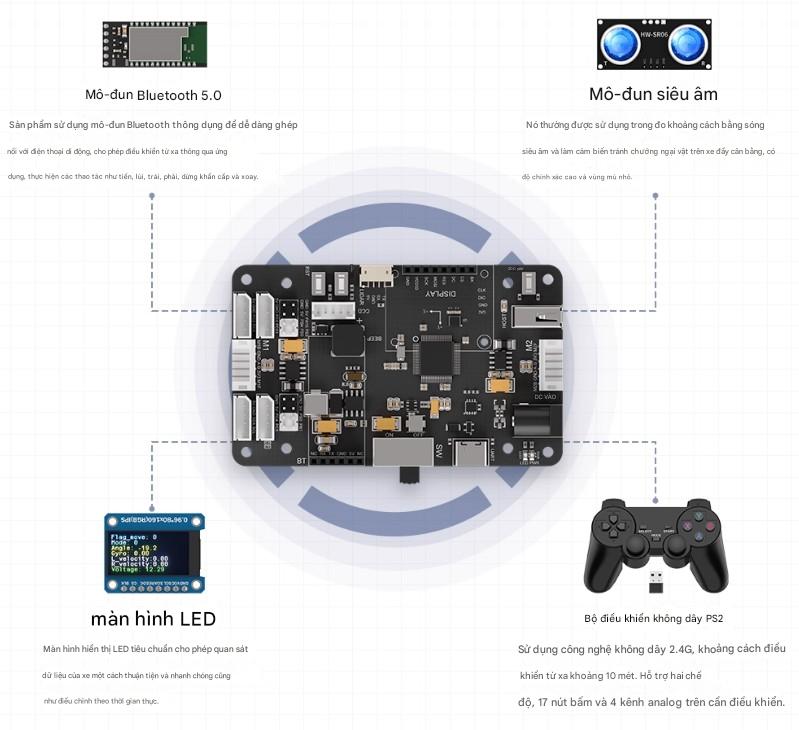
Điều khiển: Có thể điều khiển linh hoạt chuyển động của xe thông qua tay cầm không dây PS2 sử dụng giao tiếp 2.4G.
2. 🧠 Các Mô-đun Thị giác và Cảm biến Tương thích
MiniBalan có thể được nâng cấp với nhiều mô-đun AI và cảm biến khác nhau để thực hiện các chức năng tiên tiến:
-
Phiên bản Tiêu chuẩn (PS2 Wireless Handheld): Xe cân bằng cơ bản, điều khiển qua tay cầm không dây.
-
Phiên bản CCD Line Follower: Tích hợp mô-đun camera CCD để thực hiện tính năng theo dõi đường kẻ đen một cách chính xác.
-
Phiên bản K210 Vision Module (WonderMV): Tích hợp mô-đun thị giác nguồn mở K210 (WonderMV), có khả năng:
-
Nhận dạng màu sắc, theo dõi màu sắc.
-
Tuần tra thị giác (Visual patrol).
-
Hỗ trợ tự học huấn luyện AI.
-
-
Phiên bản AI Large Model (WonderLLM): Tích hợp mô-đun AI WonderLLM, cho phép gọi mô hình lớn đa phương thức (văn bản, giọng nói, thị giác) để thực hiện:
-
Trò chuyện nhân cách hóa.
-
Điều khiển bằng giọng nói.
-
Hiểu bối cảnh, né tránh chướng ngại vật thông minh và các ứng dụng sáng tạo AI khác.
-
-
Phiên bản Deluxe/Flagship: Có thể bao gồm nhiều cảm biến cùng lúc như:
-
Cảm biến Theo dõi 8 kênh: Hỗ trợ theo dõi đường đen rộng $0.5 \text{cm} \sim 8 \text{cm}$ và hỗ trợ hiệu chỉnh một chạm.
-
Camera CCD/WonderMV/WonderLLM.
-
Laser Radar (MS200): Sử dụng đo khoảng cách TOF để cảm nhận môi trường $360^\circ$ xung quanh, thực hiện các chức năng như né tránh chướng ngại vật, theo dõi radar và cảnh giới.
-
3. 🔌 Các Mô-đun phụ kiện khác
-
Bộ gỡ lỗi TTL/USB (BusLinker-V2.5): Dùng để gỡ lỗi và lập trình các servo bus hoặc các thiết bị giao tiếp TTL/UART khác.
-
Bộ điều khiển Bus Servo (Tổng tuyến): Mạch điều khiển tập trung cho nhiều servo bus, thường đi kèm với cáp USB.
MiniBalan là một nền tảng linh hoạt, lý tưởng cho việc thử nghiệm các thuật toán điều khiển và trí tuệ nhân tạo trên robot di động.